
6축 수직다관절 로봇 ‘ZRA’
6 AXIS
Pass-Through 모션
Small Footprint
Payload 5-7kg
Weight 17kg
Working Area Φ1320-1720
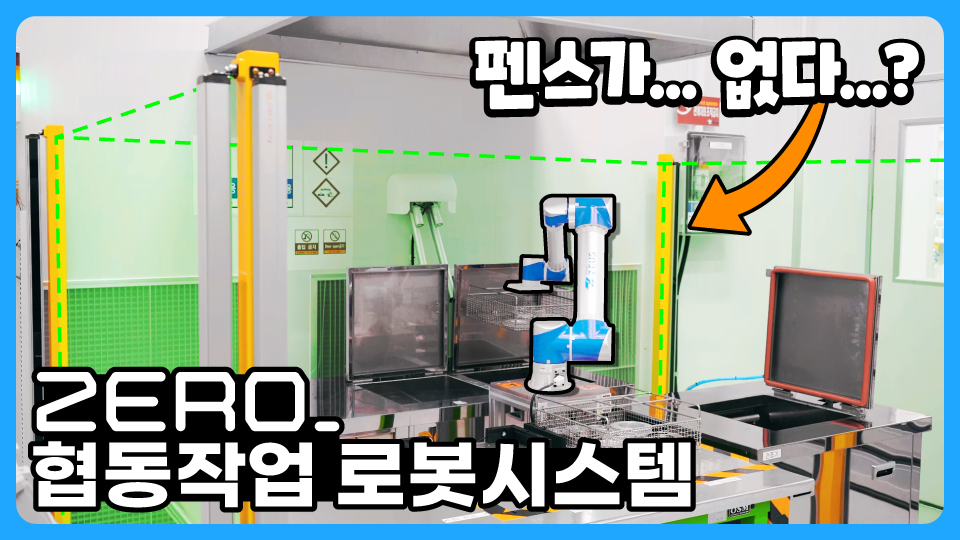
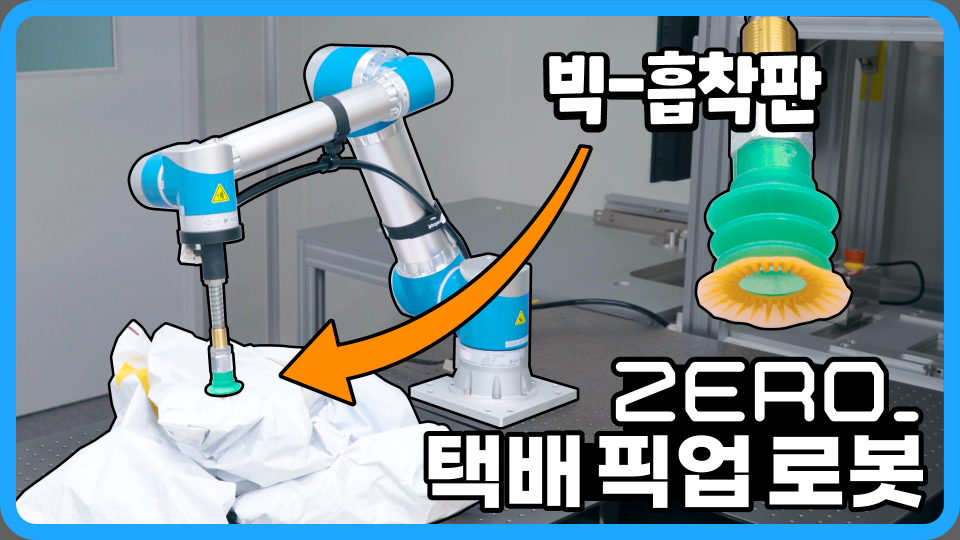
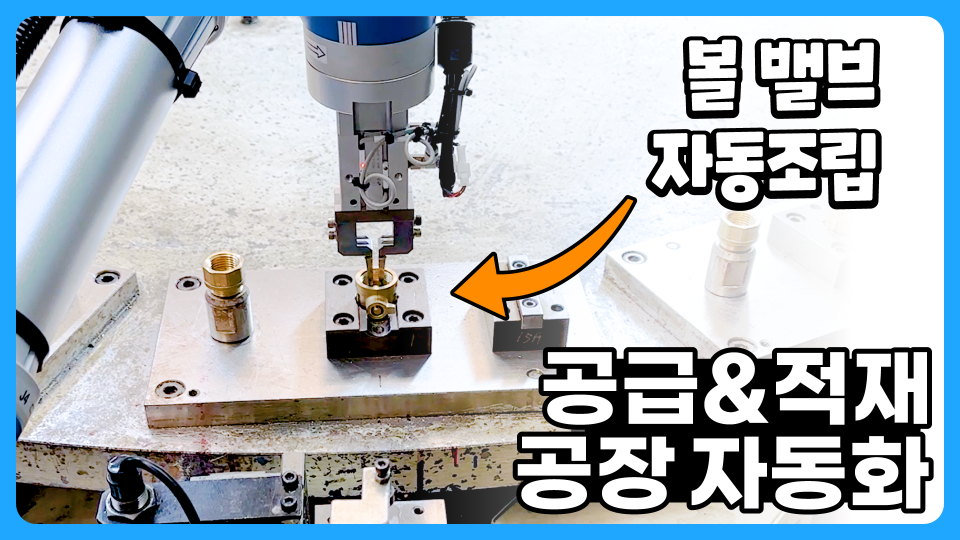
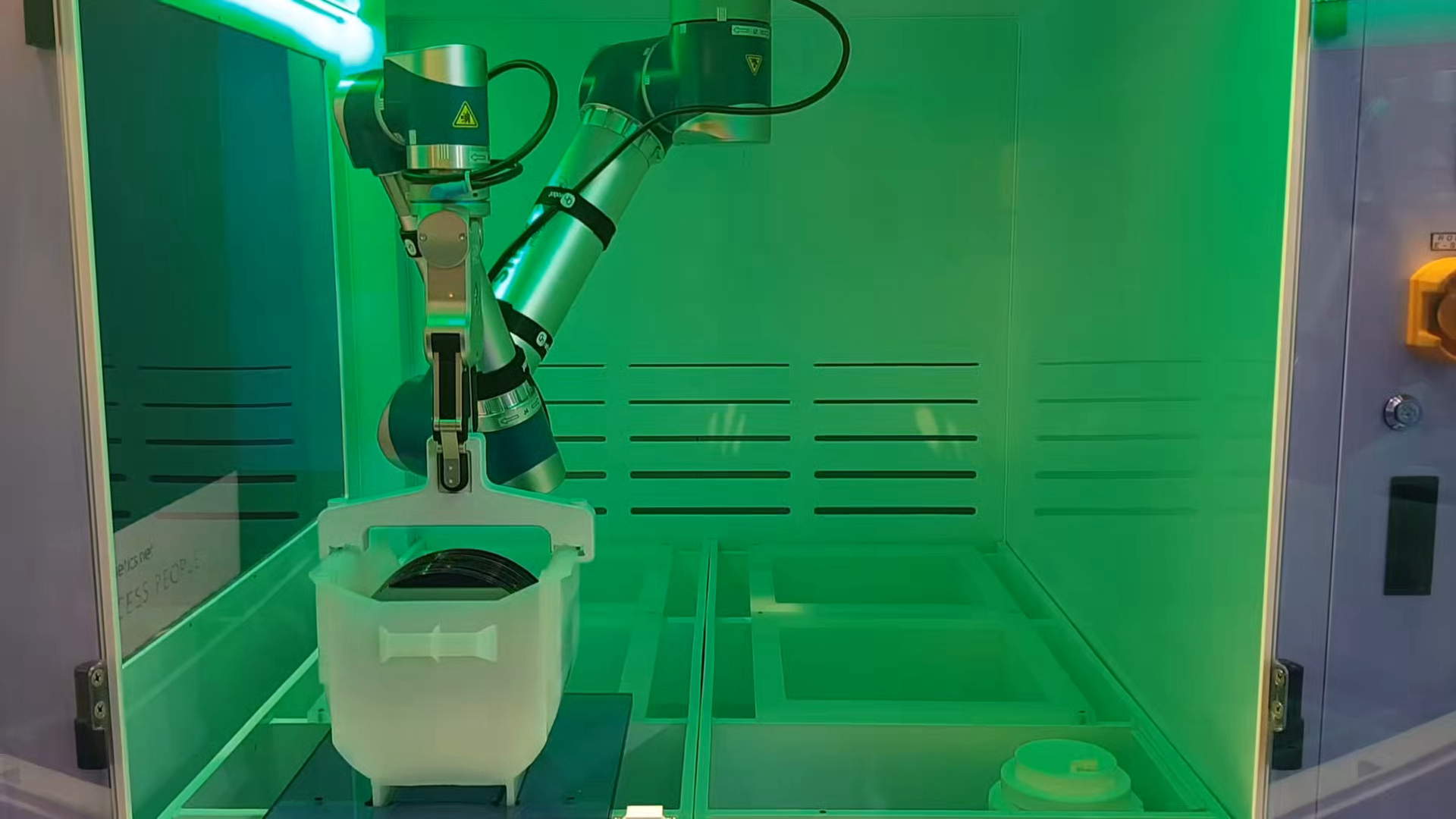
활용사례
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
공간과 시간을 절약하는
Pass-Through 모션
Pass-Through 기능
제우스의 특허 기술을 기반으로, 1st Arm 이 2nd Arm 에 비해 긴 매니퓰레이터의 특징적인 동작입니다 .
관절의 회전 없이 작업물을 매니퓰레이터의 반대편으로 이송합니다.
동일한 구간 이동 시의 경로 비교
Motion 구현 시, Pass-Through를 적용하여 가동 공간과 전체 공정의 Tact Time을 절약할 수 있습니다.
어디에나 쉽게 적용 가능한
Small Footprint
어디에나 설치 가능한 가벼운 무게
비슷한 수준의 가반 중량을 가진 타사 제품에 비해 가볍습니다. 덕분에 천장에 설치하여 footprint를 최소화하는 것이 가능합니다.
작은 footprint를 가져 좁은 공간에도 설치가 가능합니다.
Diameter of base flange: 149mm
Mounting: M8 screw x 7 (P.C.D. 132mm)

경제성
ZEUS 다관절 로봇은 형광등 5개 분에 해당하는 250W의 전력소비로 운영 비용을 절감합니다. 또한 모듈화된 구동부 설계로 유지보수가 용이하고 비용 또한 저렴합니다.
접근성
가장 널리 사용되는 Python 오픈 소스를 제공함으로써 개인용 PC와 조그 스틱 혹은 펜던트 단독으로 쉽게 ZEUS 로봇을 교시할 수 있습니다.
유료 소프트웨어가 없고 구입할 옵션이 없어 별도의 비용이 추가되지 않습니다.
| 항목 | 단위 | ZRA-0503P | ZRA-0515P | ZRA-0502N | ZRA-0514N | |
|---|---|---|---|---|---|---|
| 구조 | - | 수직 다관절 로봇 | ||||
| 자유도(DOF) | - | 6 | ||||
| 구동 방식 | - | BLDC motor | ||||
| 위치 감지 방법 | - | Multi-turn ABS (battery backup) | ||||
| 가반 하중 | kg | 7 | 5 | 7 | 5 | |
| Arm 길이 | mm | 660 | 860 | 660 | 860 | |
| 동작 범위 | mm | Φ 1320 | Φ 1720 | Φ 1320 | Φ 1720 | |
| 가동 범위 | J1-2 | deg | 480 (±240) | |||
| J3 | 480 (±240) | 300 (±150) | ||||
| J4-5 | 480 (±240) | |||||
| J6 | 720 (±360) | |||||
| 가동 속도 | J1-4 | deg/s | 178.2 | |||
| J5-6 | 267.3 | |||||
| Linear | mm/s | 4420 | 5540 | 4570 | 5700 | |
| 반복 정밀도 | mm | ±0.02 | ||||
| 무게 | kg | 17.2 | 17.5 | 17.2 | 17.5 | |
| Arm I/O | - | 8 inputs, 4 outputs / DC 24V output | ||||