
Home > Products > 6 Axis Robot
6 Axis Articulated Robot ‘ZRA’
6 AXIS
Pass-Through Motion
Small Footprint
Payload 5-7kg
Weight 17kg
Working Area Φ1320-1720
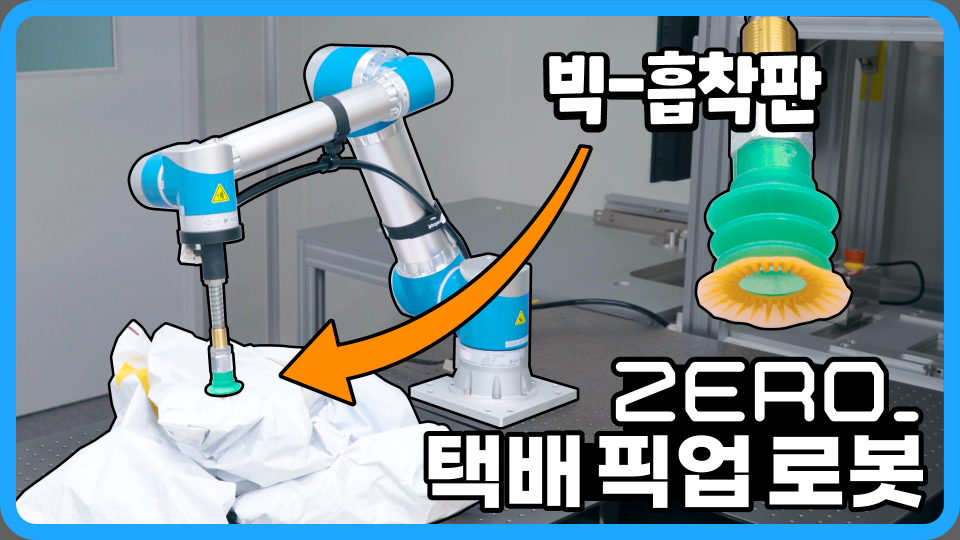
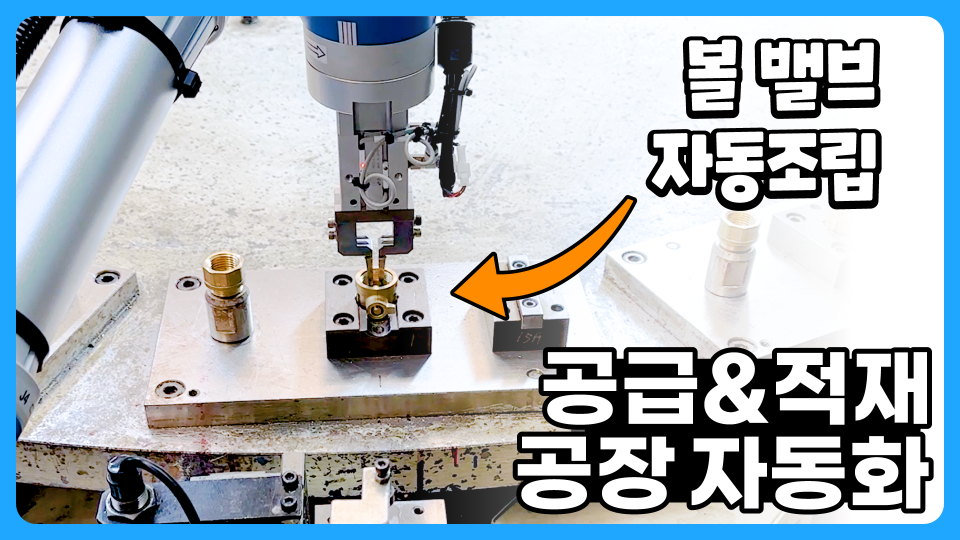
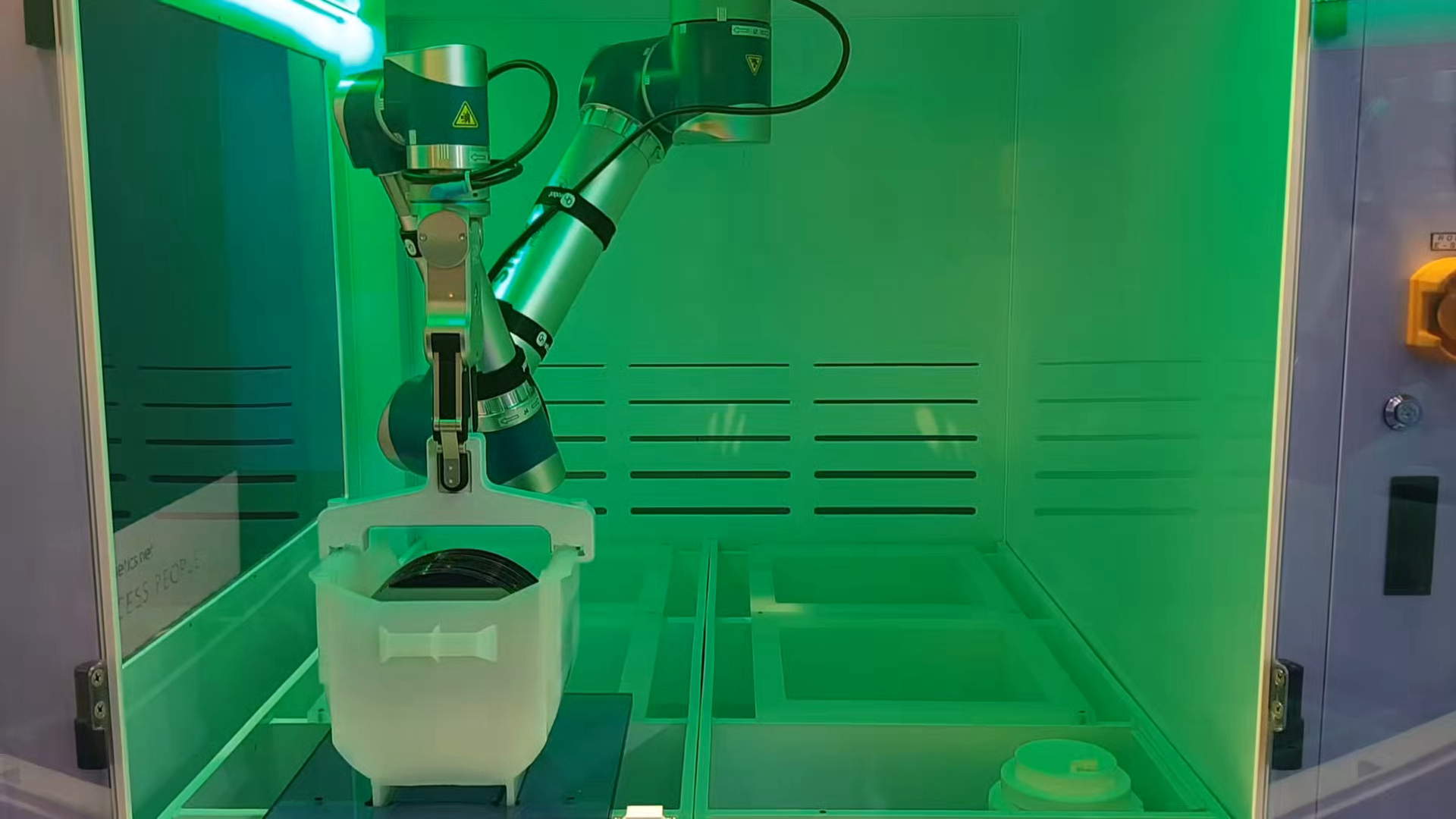
6 Axis Robot Applications
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pass-through motion
which saves time and space
Pass-Through Function
The pass-through function is a motion based on Zeus’s patent technology which lets a robot arm pass through its body without any limitation.
Comparison of Paths Moving Between the Same Positions
When implementing motion, the pass-through function can be applied to save entire process uptime and tact time.
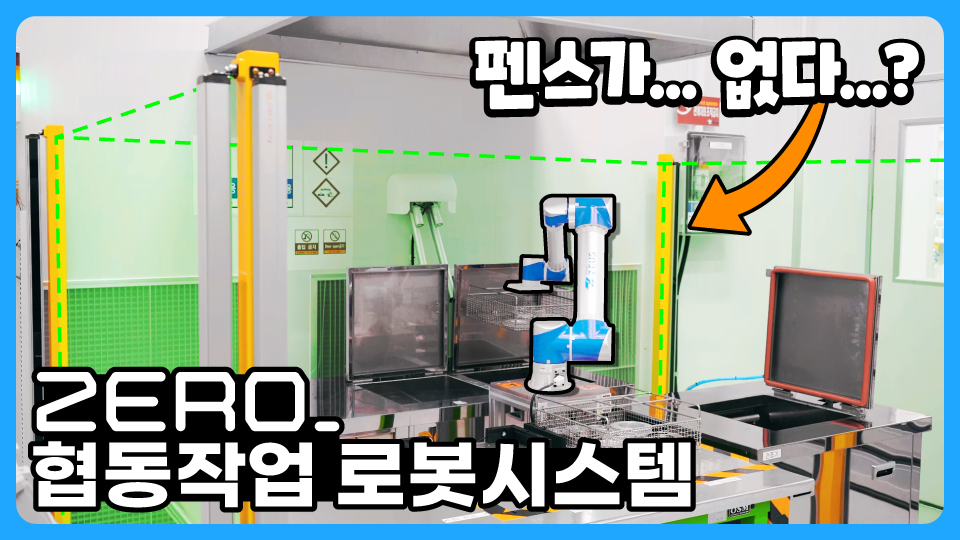
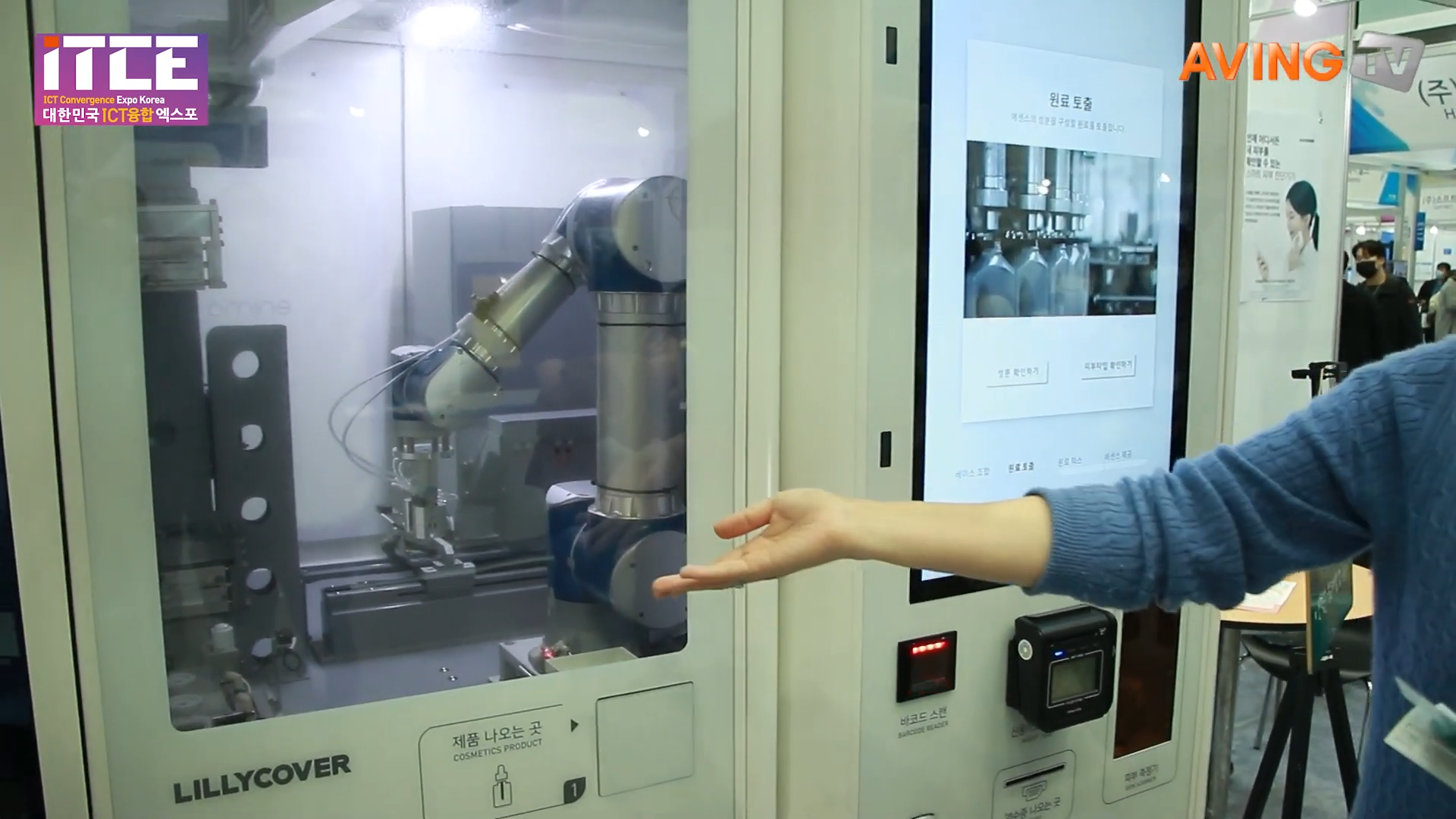
Optimal Space Utilization
Having no turning motion maximizes space utilization. ZERO shows excellent efficiency when mounted in cases such as machine tools, vending machines, and unmanned stores.
Easily Installed
Small Footprint
Light Weight and Convenient
Lighter than other products with similar payload which makes it possible to minimize footprint by installing it on the ceiling.
Small Size Can be Installed on Its Own
With a small footprint, it can be installed in small spaces.
Diameter of base flange: 149mm
Mounting: M8 screw x 7 (P.C.D. 132mm)
Performance
Repeatability of ±0.02mm
Repeatability is ±0.02, which is more accurate than other companies.

Cost Effective
ZEUS robot reduces costs with 250W power consumption which is equivalent to 4 fluorescent bulbs. Modularized joint allows easy maintenance and reasonable price.
Easy-To-Use
| ITEMS | UNIT | ZRA-0503P | ZRA-0515P | ZRA-0502N | ZRA-0514N | |
|---|---|---|---|---|---|---|
| Structure | - | Articulated Robot | ||||
| DOF | - | 6 | ||||
| Drive System | - | BLDC motor | ||||
| Encoder | - | Multi-turn ABS (battery backup) | ||||
| Payload | kg | 7 | 5 | 7 | 5 | |
| Arm length | mm | 660 | 860 | 660 | 860 | |
| Work area | mm | Φ 1320 | Φ 1720 | Φ 1320 | Φ 1720 | |
| Motion range | J1-2 | deg | 480 (±240) | |||
| J3 | 480 (±240) | 300 (±150) | ||||
| J4-5 | 480 (±240) | |||||
| J6 | 720 (±360) | |||||
| Joint speed | J1-4 | deg/s | 178.2 | |||
| J5-6 | 267.3 | |||||
| Linear | mm/s | 4420 | 5540 | 4570 | 5700 | |
| Repeatability | mm | ±0.02 | ||||
| Weight | kg | 17.2 | 17.5 | 17.2 | 17.5 | |
| Arm I/O | - | 8 inputs, 4 outputs / DC 24V output | ||||
![]()