
메인 > 제품 소개 > 델타 로봇
{kind=link}
{kind=link}
{kind=link}
모터 동력 없는
간편한 한 손 교시
세 관절의 통합 브레이크 해제 스위치
브레이크 해제 스위치를 엔드 이펙터에 장착하여 서보 전원을 끈 상태에서 수동조작으로 간단히 티칭이 가능합니다.
Modular 델타 로봇
관절 모듈을 사용하여
부품 교체와 수리가 용이
컨베이어 활용을 고려한 프레임 디자인 (특허 출원)
컨베이어 시스템 배치 예시
안정성과 공간 활용성이 뛰어난 프레임 사용으로 천장에 부착하지 않고도 사용 가능합니다.
하부 개방 구조로 설치와 활용이 용이합니다.

접근성
가장 널리 사용되는 Python 오픈 소스를 제공함으로써 개인용 PC와 조그 스틱 혹은 펜던트 단독으로 쉽게 ZEUS 로봇을 교시할 수 있습니다.
유료 소프트웨어가 없고 구입할 옵션이 없어 별도의 비용이 추가되지 않습니다.
모델명 확인
| 항목 | 단위 | ZRC-0104N | ZRC-0104R | ZRC-0313N | ZRC-0313R | ZRC-0316N | ZRC-0316R | |
|---|---|---|---|---|---|---|---|---|
| 구조 | - | 병렬형 로봇 / Pararell robot | ||||||
| 자유도(DOF) | - | 3 | 4 | 3 | 4 | 3 | 4 | |
| 구동 방식 | - | BLDC 서보 모터 | AC 서보 모터 | |||||
| 위치 감지 방법 | - | Multi-turn ABS (battery backup) | ||||||
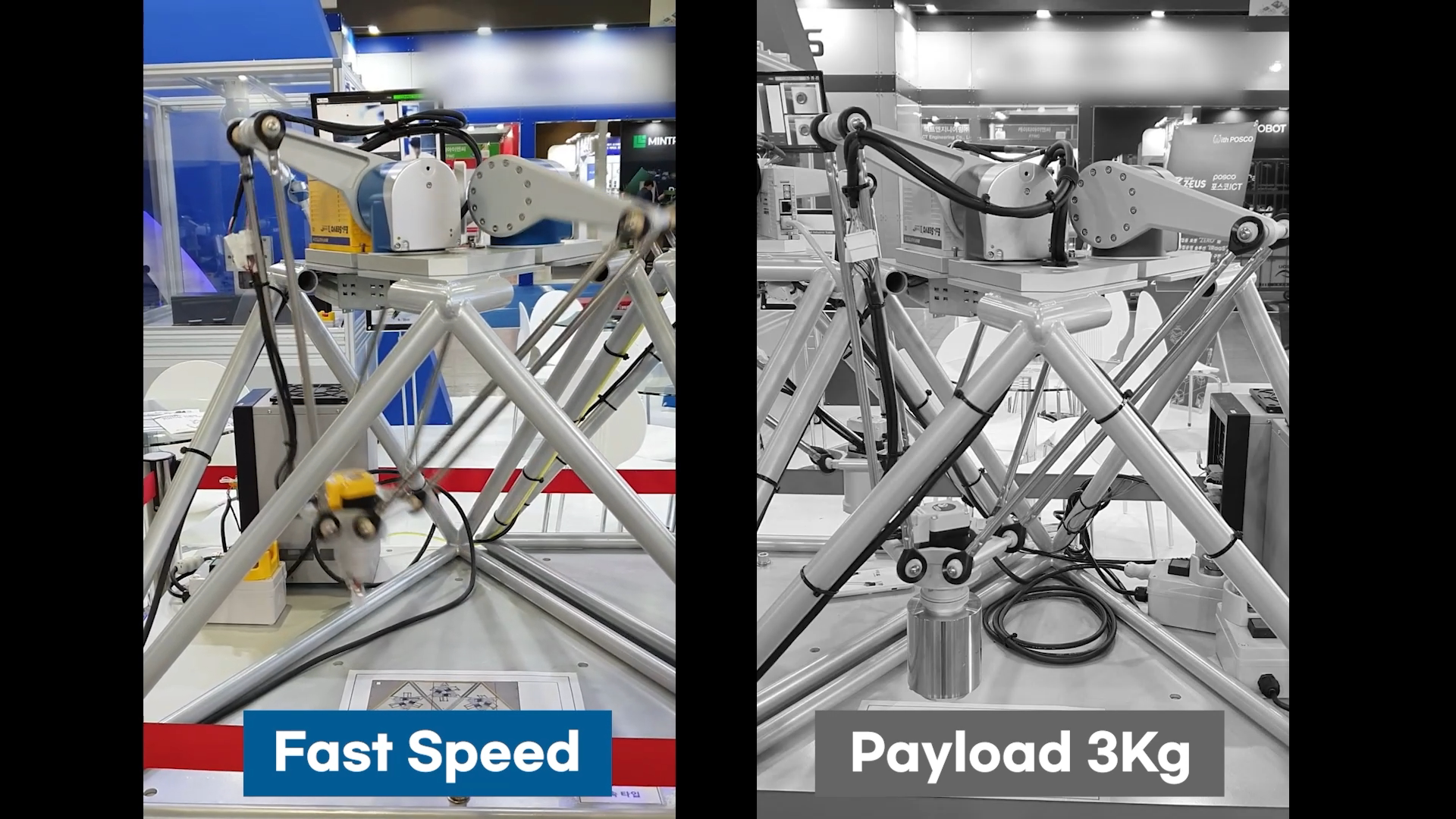
| 가반 하중 | kg | 1 | 3 | 2 | 2 | 1 | ||
| 가동 범위 | XYZ | mm | Φ 400 x H100 | Φ 1300 x H300 | Φ 1600 x H300 | |||
| Roll | deg | - | 360 (±180) | - | 360 (±180) | - | 360 (±180) | |
| 합성 속도 | XYZ | mm/s | 4000 | 4950 | ||||
| Roll | deg/s | - | 1420 | - | 1000 | - | 1000 | |
| 반복 정밀도 | XY | mm | ±0.1 | ±0.15 | ||||
| Roll | deg | - | ±0.1 | - | ±0.1 | - | ±0.1 | |
| 본체 중량 | kg | 19 | 20 | 80 | 81 | 80 | 81 | |
| 모터 전력 소비량 | W | 600 | 3000 | |||||