
메인 > 제품 소개 > 델타 로봇 > 대형 델타
병렬형 로봇 ‘ZRC’
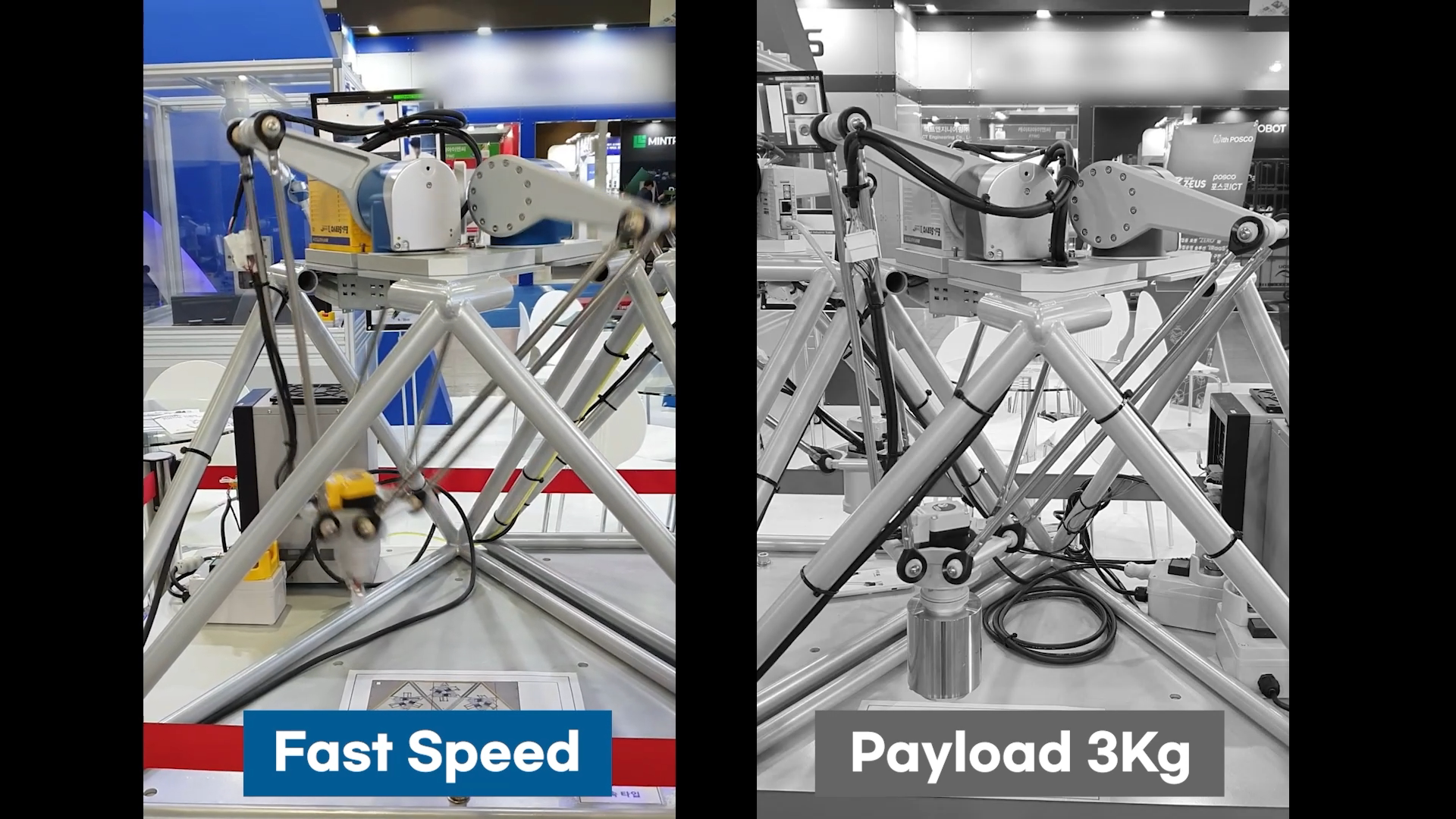
DELTA (대형)
Payload
3kg
Standard
Cycle Time
0.4s
Working Area
Ø 1300, 1600
기존 중형 델타 로봇의 가동범위를 대폭 확대하여
지름 1300~1600mm, 높이 300mm의 가동범위
{kind=link}
{kind=link}
{kind=link}
{kind=link}
고강성 경량 설계
가반하중과 반복정밀도 향상
길어진 Arm 길이 대비 가반하중과 반복정밀도 향상을 위해 1st Arm을 고강성 경량으로 설계하고 2nd Arm에 카본 FRP 소재를 적용하였습니다
향상된 델타 로봇
자동 엔코더 리셋 기능
구동부 원점에 마그넷 센서와
도그를 사용하여 로봇 스스로
원점 자세 복귀 가능
쉽게 교체 가능한
엔드이펙터
Kcs, UL 인증 대응
고출력 모터 사용
각 축마다 1kW 고출력 모터를 사용하여
Arm 길이 대비 빠른 속도 구현
컨베이어 트래킹
컨베이어 시스템 배치 예시
제품 위치 추적뿐만 아니라 워크 정렬 기능까지 지원하여 다양한 산업환경에서 추가 설비를 줄이고 공정을 단순화할 수 있습니다.
정확성
반복 정밀도 ± 0.15mm, 0.1deg
접근성
가장 널리 사용되는 Python 오픈 소스를 제공함으로써 개인용 PC와 조그 스틱 혹은 펜던트 단독으로 쉽게 ZEUS 로봇을 교시할 수 있습니다.
유료 소프트웨어가 없고 구입할 옵션이 없어 별도의 비용이 추가되지 않습니다.

| 항목 | 단위 | ZRC-0313N | ZRC-0313R | ZRC-0316N | ZRC-0316R | |
|---|---|---|---|---|---|---|
| 구조 | - | 델타 ( 병렬형 로봇 ) | ||||
| 자유도(DOF) | - | 3 | 4 | 3 | 4 | |
| 구동 방식 | - | AC servo motor | ||||
| 위치 감지 방법 | - | Multi-turn ABS (battery backup) | ||||
| 가반 하중 | kg | 3 | 2 | 2 | 1 | |
| 가동 범위 | XY | mm | Φ 1300 | Φ 1600 | ||
| Z | 300 | |||||
| Roll | deg | - | ±180 | - | ±180 | |
| 최대 속도 | XYZ | mm/s | 6900 | |||
| Roll | deg/s | - | 1350 | - | 1350 | |
| 반복 정밀도 | XY | mm | ±0.15 | |||
| Roll | deg | ±0.1 | ||||
| 무게 | kg | 80 | 81 | 80 | 81 | |
| 통신 수단 | - | Ethernet / IP | ||||